
ก่อนที่เพื่อนๆจะไปต่อนั้น เพื่อนๆทุกคนควรจะรู้จักกับคำศัพท์ต่างๆที่เป็นพื้นฐานที่นิยมใช้กันก่อน ซึ่งศัพท์เหล่านี้จะเป็นสิ่งที่ทำให้ผมและเพื่อนๆคุยกันรู้เรื่อง อ่านแล้วเข้าใจ อีกอย่างมันจะทำให้เพื่อนๆสามารถนำไปใช้ต่อได้ด้วย ไม่ว่าจะอ่านจากแหล่งความรู้อื่นเพิ่มเติม หรือคุยกับคนอื่นที่มีฐานความรู้เดียวกันได้ ถึงแม้ว่าคำบรรยายศัพท์ต่างๆของผมอาจจะไม่เป็นทางการ บอกไว้ก่อนเลยนะครับ 55 เพราะผมอยากให้เพื่อนๆเข้าใจและเห็นภาพได้อย่างชัดเจนนั่นเอง
คำศัพท์พื้นฐาน
หุ่นยนต์ฮิวมานอยด์นั้นเป็นแบบ open kinematic chain ประกอบไปด้วย 2 ส่วนด้วยกัน ส่วนแรกเรียกว่า ขา(legs) อีกส่วนเรียกว่า ลำตัว(torso) ทั้งสองเชื่อมต่อกันด้วยจุดที่เรียกว่า สะโพก(hip)
ขาที่ติดกับพื้น จะหนึ่งขาหรือสองขาก็ได้ ถ้ามีเพียงแค่ขาเดียวสัมผัสพื้นเราจะเรียกขาที่สัมผัสกับพื้นว่า ขายืน(stance leg) ส่วนขาอีกข้างจะเรียกว่า ขาแกว่ง(swing leg) จุดปลายสุดของขาไม่ว่าจะมีเท้าหรือไม่มีเท้า เราจะเรียกว่า เท้า(foot)
จังหวะการเคลื่อนที่จะดูจากจำนวนเท้าที่สัมผัสพื้นเป็นหลัก ถ้าสัมผัสพื้นเพียงเท้าเดียวจะเรียกว่า single support ถ้าสัมผัสพื้นสองเท้าจะเรียกว่า double support
การเดิน(Walking) นั้นจะสลับกันระหว่าง single support และ double support วนไปเรื่อยๆ โดยจะมีตัวแปรในการเดินคือ (ระยะทางในแนวขนานกับพื้นของศูนย์ถ่วงของหุ่นยนต์)displacement of horizontal of robot’s center of mass
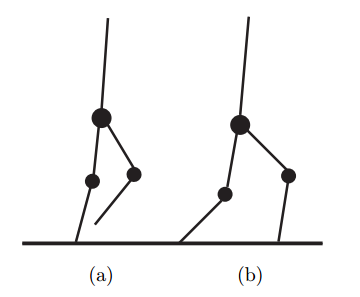
รูป (a) คือ single support หรือ swing phase
รูป (b) คือ double support
การวิ่ง(Running) คือการที่มีลำดับจังหวะ single support, flight(ไม่มีเท้าสัมผัสพื้น), single support
ชนิดของการเดินแบ่งเป็น 2 แบบ คือ
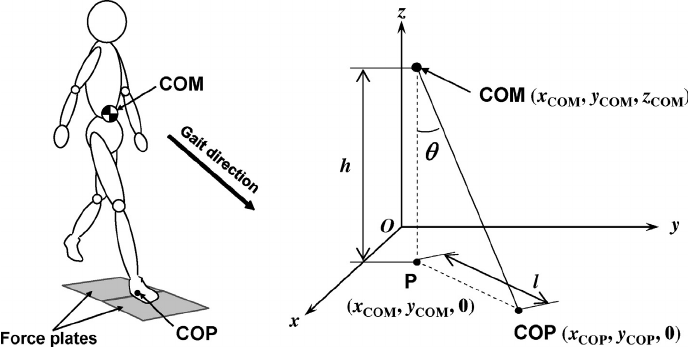
- การเดินแบบ static คือการเดินที่ CoM(center of mass) ของหุ่นยนต์ไม่ออกจาก support polygon(กรอบเท้าของหุ่นยนต์ที่สัมผัสกับพื้น)
- การเดินแบบ dynamic คือการเดินที่ CoP(center of pressure) หรือ ZMP(zero moment point) ของหุ่นยนต์ออกจาก support polygon เป็นบางขณะ

หลายคนอาจจะกำลังงงว่า CoM กับ CoP ต่างกันอย่างไร ดูรูปนี้แล้วน่าเข้าใจมากขึ้น
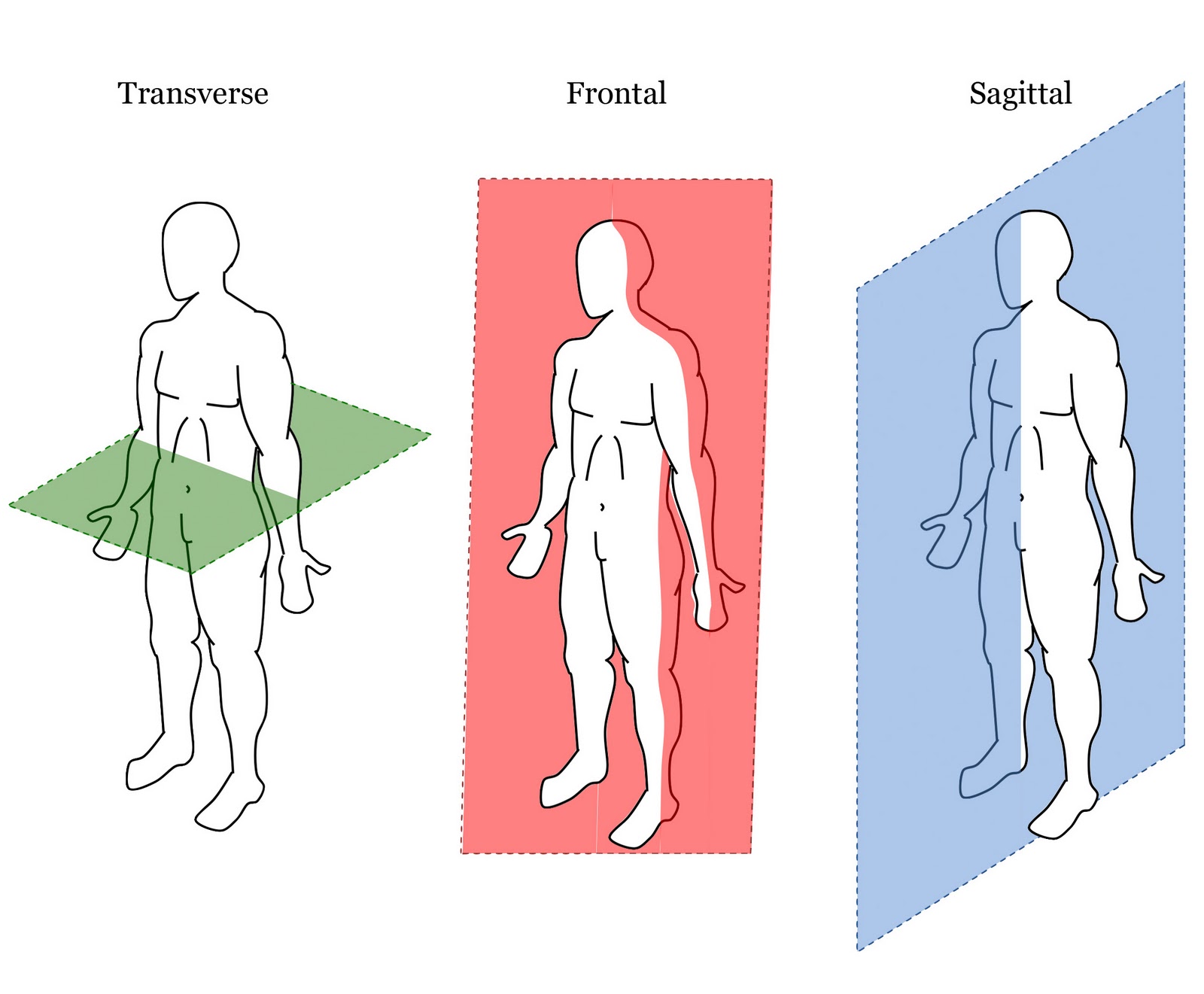
- sigittal plane คือ ระนาบที่แบ่งคนเป็นซีกซ้ายและซีกขวา
- frontal plane คือ ระนาบที่แบ่งคนออกเป็นด้านหน้าและด้านหลัง
- transverse plane คือ ระนาบที่แบ่งคนออกเป็นด้านบนและด้านล่าง
